|
|
2023年的智能驾驶市场热闹非凡,前有上海车展的百家争鸣,后有各路玩家你追我赶、相互DISS。 可以看到,智能驾驶已经成为各大主机厂占领市场的必争之地,也是多家供应商纷纷发力的热点。传统主机厂、造车新势力、传统Tier、科技公司、互联网企业、甚至消费电子企业,都在大力布局智能驾驶业务,力争在激烈的汽车智能化赛道上,拥有一席之地。 那么,从去年到今年,智能驾驶行业的热点有哪些?趋势在哪里?什么是全行业在共同推进和探索的?优势和难点是什么?市场现状如何? 本文带着这些问题,逐一盘点并解读智能驾驶的几大热点:城市NOA、去高精地图、去激光雷达、大模型上车、舱驾融合,并从技术和市场层面,给出解读。
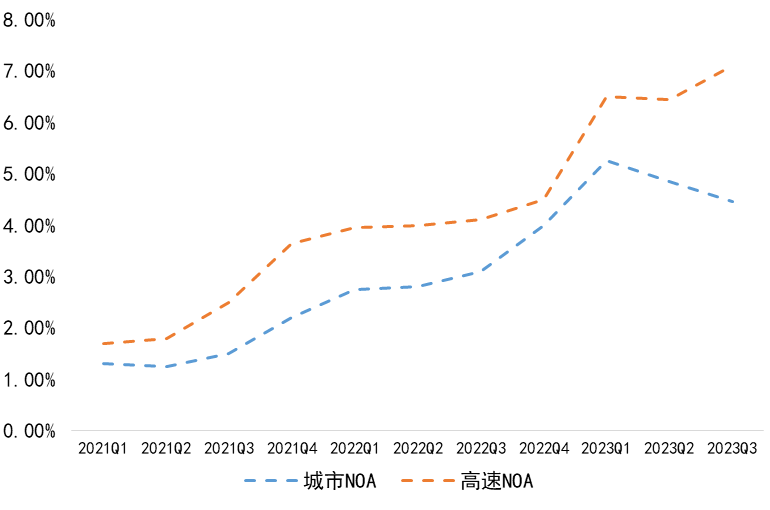
智能驾驶发展至今,城市NOA作为当前量产智能驾驶的最强功能,已经成为行业内的热点,也是各路玩家纷纷布局的重点。 2021年起,在特斯拉、小鹏等头部造车新势力的影响下,各主机厂陆续推出适用于高速公路和城市快速路场景的高速NOA功能;从2022年起,NOA的应用场景从高速推广到城区,得益于“BEV+Transformer”的普及,2023年是城市NOA群雄逐鹿的一年,多家车企发布城市NOA“开城计划”。 目前城市NOA已经成为市场关注的热点,并且陆续搭载在新车型上。根据佐思汽研的数据统计,2023年1-9月,国内乘用车高速NOA的渗透率为6.7%,同比增加2.5个百分点;城市NOA的渗透率为4.8%,同比增加2个百分点。
截至2024年1月,已经量产搭载城市NOA的车企主要有小鹏、华为系(极狐、阿维塔、问界)、理想、智己等4家,另外特斯拉在北美推送了城市NOA,而蔚来和魏牌(毫末方案)的城市NOA已经公布正在路测中。根据表1的汇总结果,整体来看,城市NOA的落地进展,距离宣传发布的目标,存在一定差距,没有达到预期,尤其是部分车企曾经号称在2023年底全国可用,实际上目前只落地了有限的几个城市。不过,各家也正在努力推进城市NOA的全面落地,力争在2024年占据更多的市场份额,也值得我们期待。
小鹏将城市导航辅助驾驶命名为城市NGP(Navigation Guide Pilot),在P5、G9、G6、P7i等车型上均有搭载。这4款车型都是搭载激光雷达的车型,并且从G9开始,小鹏的车型都采用前视800万像素双目摄像头,并通过2颗高算力的NVIDIA Orin-X SoC芯片,提供508TOPS的超高AI算力,满足城市NGP的感知和算力要求。 小鹏于2022年9月在广州率先推送城市NGP,是国内最早让城市导航辅助驾驶上车的车企。截至2024年1月,小鹏的城市NGP已经覆盖国内52个城市,包括广州、深圳、上海、苏州、南京、杭州、宁波、北京、天津、成都、西安、武汉、长沙等,也是国内可用范围最广的城市导航辅助驾驶。
华为的城市导航辅助驾驶功能称为城市NCA(Navigation Cruise Assist),已经搭载在华为深度参与的极狐、阿维塔和问界系列车型上。极狐、阿维塔车型配置了3颗激光雷达和具备400TOPS算力的华为MDC810计算平台,问界系列车型配置了1颗激光雷达和200TOPS算力的华为MDC610计算平台。截至2024年1月,华为的城市NCA开放了国内6个城市:上海、深圳、广州、杭州、重庆、北京。
理想的城市NOA在其L7、L8、L9三款车型上实现。这三款车型都配置了1颗激光雷达和2颗NVIDIA Orin-X芯片,并且前视双目摄像头和侧视摄像头的像素都高达800万,足以满足L2级智能驾驶的硬件性能要求。截至2024年1月,理想城市NOA已经在北京、上海、广州、深圳、杭州、成都等国内10个城市开通。
智己会在其现有车型L7、LS6、LS7中,全面搭载城市NOA功能,并通过1颗激光雷达和1颗254TOPS算力的NVIDIA Orin-X芯片来实现。不过,智己的城市NOA推送时间较晚(2024年1月),目前只开通了上海1个城市。 特斯拉的城市NOA目前只在北美地区推送,还未进入中国,虽然一直宣称即将在国内推送,但至今还未见身影。蔚来和毫末则还在道路测试阶段,还没有真正开始推送给用户。
在2023年上海车展,国内多家主机厂与智能驾驶解决方案提供商,纷纷喊出了“去高精地图”的口号:小鹏宣称“城区NGP,2023年6月起不需要高精地图”;理想宣传“AD Max 3.0系统逐步摆脱高精地图”;智己提出“数据驱动道路环境感知模型替代高精地图”;华为直言“ADS 2.0系统不需要高精地图,有图无图都能开”;百度作为高精地图提供商,也提出了“轻地图”的智能驾驶方案;毫末则发出“重感知、轻地图”的声音。
智能驾驶对高精地图的数据实时性要求很高,也就是需要地图“保鲜”,甚至每日更新一次。而图商的平均更新周期以月或者季度为单位,行业内的平均更新周期是3个月左右,这就导致图商提供的高精地图,难以满足智能驾驶开发的需求。 高精地图由于对精度要求高、信息丰富,因此需要采集的数据量很大,导致相比于普通导航地图,会产生更高的成本,并花费更长的周期。高成本与长周期,与当前智能驾驶行业的降本和快速迭代的趋势,严重不符,所以去高精地图逐渐成为一种趋势。 调研结果显示,分米级高精地图的测绘成本在每公里十元左右的水平,每台车每天可以采集500公里左右的道路数据;厘米级高精地图的测绘成本大约为每公里千元,每台车每天能采集约100公司的道路数据。可见精度提高十倍,产生的测绘成本与周期,会成倍增加甚至指数级增加。 正是由于BEV+Transformer的广泛应用,让传感器,尤其是摄像头检测到的环境数据,能够用于构建实时的局部地图,逐渐替代基于先验数据的高精地图。
如今已经进入2024年,去高精地图的进展如何?行业内实现完全“去高精地图”了吗?答案似乎是否定的。根据对以上几家公司无图方案的调研,以及行业内其他公司的解决方案,我们发现目前主要通过3种方式,来替代传统的高精地图: 一是实时局部建图,基于传感器信息,通过BEV+Transformer,构建实时的局部地图。这种方法理论上可以完全去掉高精地图,但根据大部分感知算法专家的意见,现阶段的环境感知效果,还达不到传感器与高精地图融合的水平,只能说正在逐步提升,向完全无图靠近。 二是众包地图,即通过已售出车辆收集道路信息,整合来自普通用户的数据,绘制地图。这种方式在前几年就已经有人提出并且正在采用,本质上还是在构建地图,只是不再依赖图商,而是让用户帮助主机厂采集地图数据。 三是轻量化高精地图,是一种精简版的高精地图,精度和信息量介于导航地图与高精地图之间。这种方案可以理解为是一种过渡状态,是综合平衡整体感知定位效果与地图成本之后的结果,实际上仍然需要地图。 通过以上分析,不难看出,去高精地图虽然是主机厂和智能驾驶开发者所推崇的趋势,但目前还没有完全实现。去高精地图,更多的是在摆脱对图商的依赖;而当前的环境感知效果,还不能达到完全无图的水平;现阶段高阶智能驾驶还离不开高精地图,只是绘图的方式在改变,对精度的要求在降低。
激光雷达,曾被称为“自动驾驶之眼”,但高昂的成本让大多数车企望而生畏。近几年来,去激光雷达的声音一直存在,而纯视觉感知方案与视觉+激光雷达融合感知方案的技术路线之争,也一直没有停止过。
激光雷达一度是国内的高阶智能驾驶,尤其是城市NOA的必备项,国内的头部智驾厂商,也普遍采用摄像头与激光雷达数据融合的方案,实现高阶智能驾驶所要求的精准感知。小鹏、蔚来、理想、阿维塔、问界……都搭载了激光雷达。 马斯克曾不止一次提出:“人类驾驶只用眼睛观察环境,所以根据第一性原理,纯视觉方案才是正确的路线。”而特斯拉作为智能驾驶的先驱者,本身也证实纯视觉方案的可行性。 从目前高阶智驾的搭载情况来看,大部分车型仍然配置了数量不等的激光雷达,只有特斯拉和极越,选择纯视觉方案。 众做周知,特斯拉的视觉感知算法,始终处于行业的领头羊地位,而极越作为百度重点打造的车型,纯视觉的底气自然来源于百度在智能驾驶领域多年的积淀;其他主机厂和方案商,我们大胆猜测,有没有这样一种可能:采用融合方案不仅是因为融合方案的感知效果更好,更因为对自家的纯视觉感知算法不够自信,以及激光雷达有利于放大车企对智能化的营销效果,所以配置了高成本的激光雷达。
虽然国内大多数高阶智驾车型都搭载了激光雷达,但车载激光雷达作为技术壁垒高、需求前景不明朗的领域,尤其是近几年成本才逐渐降到万元以下,导致目前存在的供应商非常有限,产品型号也有限,与摄像头、毫米波雷达等传感器相差很大。 目前车载激光雷达供应商主要有速腾聚创、图达通、禾赛科技、Luminar、览沃、Velodyne、Ouster、亮道智能、探维科技、北醒等,以及少数宣称自研的方案商如华为。目前量产上车的激光雷达是半固态激光雷达,从国内的出货量。 竞技宝官网app |