|
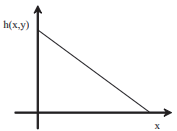
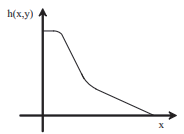
竞技宝官网app·一种基于机器视觉的模糊图像复原算法由于表面特性对产品的质量和性能有相当大的影响,因此,表面特性的测量在制造业中具有重要意义。在传统的表面测量中,常见的方法是将探针贴合工件表面并监测其运动,以便追踪表面的微轮廓。但是接触式测量会带来很多的缺点。所以,随着技术的发展,非接触式的检测方法开始受到了更广泛的关注和应用。 在本文中,我们模拟了获取运动物体表面的模糊图像,再使用Lucy Restoration(LR)算法对图像进行处理,从而验证在特性条件下还原和识别原图的可行性,以便今后进一步用于工业上的表面细节信息分析。 当一个移动的物体曝光至感光元件上时,如果曝光持续一定时间,就可以记录下它的多个位置,从而产生模糊。如果曝光时间相对于运动来说足够小,那么模糊就不会被注意到。然而,低曝光时间会导致更高的噪声。通过假设,我们可以将模糊过程建模为点扩散函数(PSF)与理想图像的卷积,从而得到一个坐标上的三角形或高斯形状,如图1 所示的情况(a)和(b)。 由于考虑了匀速运动模糊,所以可以假定所有部分都退化了相同数量的模糊。所以,在假设中认为图像所引入的噪声是高斯累加的。该算法考虑了变方差的零均值高斯噪声。
通过给定1幅灰度图像g (x, y),通过线性平移不变的 PSF 函数h(x, y)退化,从而找出真实图像f (x, y)的可靠估计。 在这里,我们通过期望LR 最大化算法来探寻最大化恢复图像的可能性。从对原始图像的猜测开始,LR 算法在每次迭代中更新其猜测,使其趋向于潜在图像。从理论上讲,算法迭代的时间越长,它越接近于收敛到潜在图像。
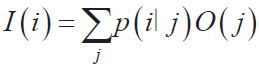
其中 O 是未模糊的物体,p(i∣j)是 PSF来自真实位置的散射成观测像素的光的分数;I (i)是无噪声的模糊图像。给定期望计数I (i),对每个像素中观察到的计数D(i)的联合似然ζ为: 比较上面两个公式可以看出,如果RL 迭代收敛,即随着迭代的进行,修正因子趋近于一个单位,那么它必定收敛于数据中泊松统计量的最大似然解。 为了评估LR 算法的性能,我们在这里设置了由两个模糊的、紧密间隔的峰值组成的二维模拟图像。在模拟中,我们采用合成图像为128 个图像点的线 的尖刺。然后将该阵列与标准偏差为1.5 个图像点的归一化高斯函数进行卷积。 此时,将平均值为0 的5%随机白噪声添加到此模糊图像。原始图像和模糊图像分别如图2(a)和(b)所示。经过20 次迭代,LR 算法的应用如图2(c)所示。在经过100 次迭代之后,如图2(d)所示,随着图像质量的进一步改善,其结果明显收敛了。
从实验结果可以明显看出,RL 算法在还原之前隐藏在噪声中的数据方面是有效的。本文在对比分析的基础上,采用了基于数字处理图像的表面粗糙度估计方法,验证了图像复原在实际生产、应用中的有效性。 [1] 宋进,欧海宁.一种基于多项式拟合的人脸识别验证算法分析[J].电子测试,2020(8):778. 竞技宝官网app |